RiverBot(TM) Progress / 78%
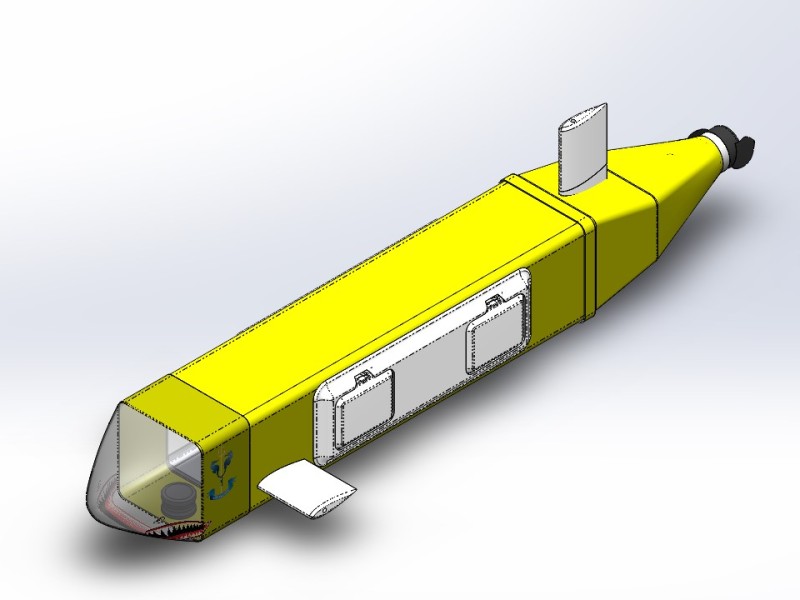
RiverBot(TM) is the name of a community designed and built autonomous underwater robot that is capable of operating in water up to 15 meters deep. This is the first of several robots we will be building.
Since we have filed for the RiverBot trademark, the correct way to refer to RiverBot is to add the (TM): RiverBot(TM)
Community meetings are held at 6:30 PM every Monday at our TrepHub location. The RiverBot project page contains the design documents and hardware information. It is hosted here
A couple of points: